Введение
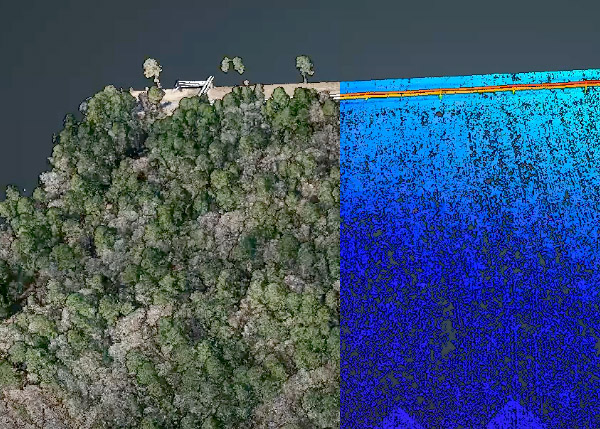
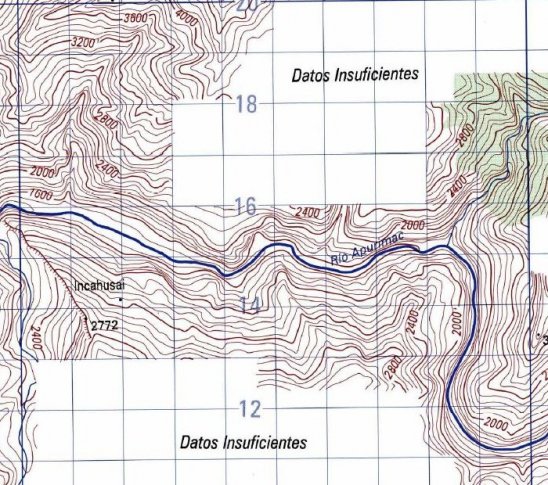
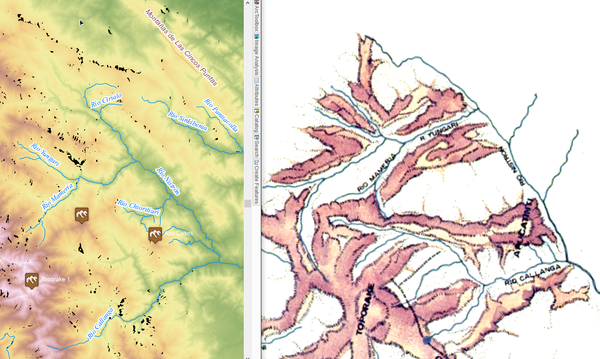
С начала 2017 года мы по крупицам собрали всевозможные пространственные данные, касающиеся Пайтити: спутниковые снимки, старые и современные карты, письменные и устные свидетельства, результаты других экспедиций, подлинные документы и легенды. Это было непростой задачей, которой мы продолжаем заниматься и по сей день. Так как мы работаем с цифровой информацией, то и карты нам нужны в цифровом виде: не отсканированные картинки JPEG, а в формате, пригодном для геоинформационного анализа. Область нашего интереса — это необитаемые территории восточных склонов Анд, и картографических материалов для них днём с огнём не сыщешь. А если они и есть, то в мелком масштабе и недостаточно информативные. Чтобы понять, с чем мы имеем дело, взгляните на две иллюстрации ниже:

Только дистанционное зондирование Земли (далее — ДЗЗ) даёт нам возможность получить достоверную и актуальную информацию об исследуемом районе, а географические информационные системы (далее — ГИС) — собрать воедино знания о территории в одном месте и получить из этого ответ на главный вопрос: «Где же находится Пайтити?»
Структура ГИС «В поисках Пайтити»
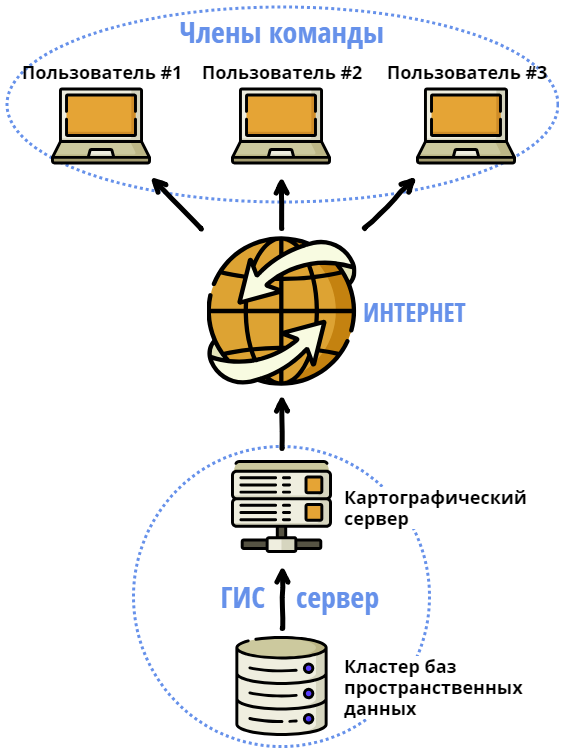
Чтобы извлечь из данных пользу мы разработали свою собственную ГИС — назовём её для красоты «В поисках Пайтити». В основе её инфраструктуры лежит виртуальный выделенный сервер под управлением операционной системы Ubuntu. На сервере (мы называем его ГИС-сервер) установлено геоинформационное и картографическое программное обеспечение (далее — ПО) с открытым исходным кодом:
- PostgreSQL — объектно-реляционная система управления базами данных с надстройкой PostGIS для поддержки географических объектов
- GeoServer — ПО для публикации геоданных на сервере (картографический сервер)
В базе данных (далее — БД) географические объекты, принадлежащие разным типам (например, «реки», «дороги инков», «деревни» и т.п.) хранятся в отдельных таблицах, а их координаты для быстроты обработки записаны в нечитаемом для человека виде:
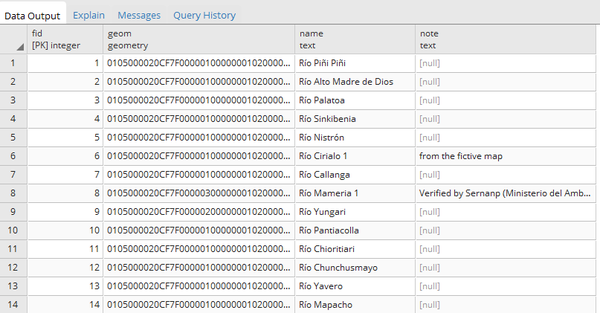
Раз в неделю автоматически создаётся резервная копия БД и отправляется в облачное хранилище, чтобы в случае поломки ГИС-сервера не допустить потери результатов нашей кропотливой работы. В течение одного дня проект можно восстановить как минимум до состояния «неделю назад».
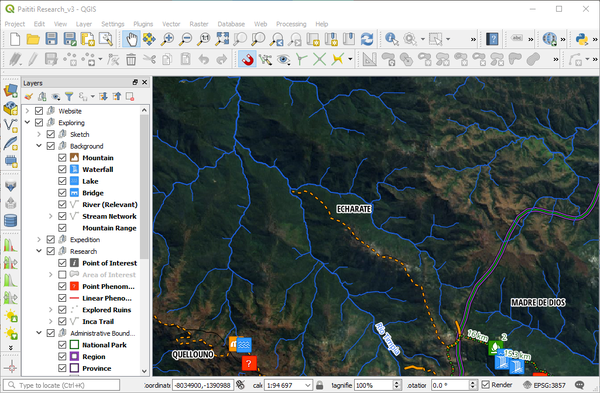
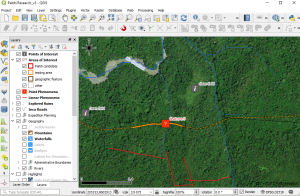
Хранение всей нашей пространственной информации в одной БД даёт замечательную возможность — все члены команды Paititi Research могут дистанционно подключиться к ней из любой точки мира. Для этого необходимо установить на свой компьютер ПО с открытым исходным кодом QGIS (работает под Windows, Mac OS и Linux). В нём пользователь может уже в привычном виде просматривать геоданные в виде карты, состоящей из отдельных ГИС-слоёв, а также проводить разнообразный анализ. Уровень доступа настраивается под каждого пользователя индивидуально, определяя, что он может видеть, и может ли он редактировать данные (например, добавлять новые объекты путём дешифрирования космических снимков).
Геоинформационный анализ
Далее начинается самое интересное — геоинформационный анализ, создание новых знаний из уже имеющихся. Вот тут-то мы начинаем «отрываться» по полной. Здесь важно отметить большой вклад, который вносит используемая нами цифровая модель рельефа (далее — ЦМР). Она позволяет извлекать количественные характеристики поверхности и моделировать движение водных потоков, а также рассчитывать освещённость территории.
Построение подробной гидрографической сети
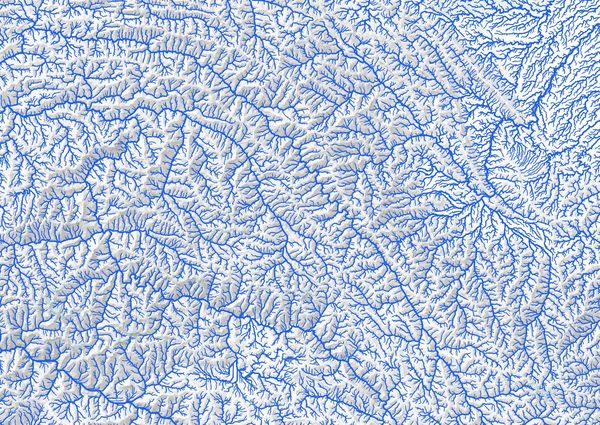
Речная сеть — это основа нашего исследования, с которой мы и начали свою работу. На названия рек ссылаются литературные источники, относительно рек описываются перемещения всех экспедиций, с помощью рек происходит геопривязка старинных карт, в конце концов вдоль рек строили и строят свои жилища люди. Чтобы снабдить разрозненную словесную информацию координатной привязкой в ГИС, просто необходимо иметь детальную карту речной сети с актуальными названиями водотоков. И такой готовой карты вы не найдёте. К счастью, смоделировать движение потоков воды, имея ЦМР, не представляет большой проблемы. Что мы и сделали. Конечно, после получения такой карты, надо снабдить реки и ручьи названиями, что уже является гораздо более сложной задачей: то, как местные жители называют небольшую речушку, не всегда реально узнать, находясь в другом полушарии Земли (увы, интернет не всесилен). Однако в итоге нам удалось определить все реки, которые так или иначе связаны с поисками Пайтити.
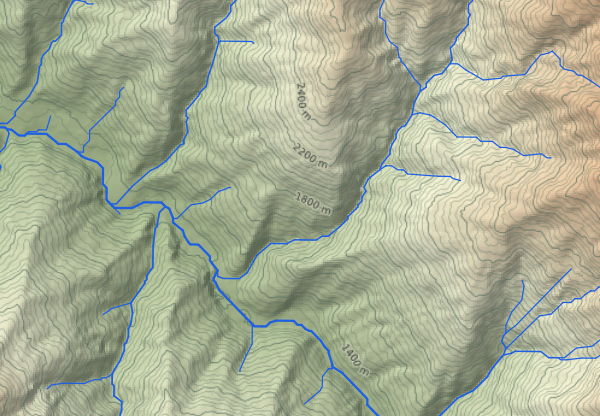
Получение морфометрических характеристик рельефа
Рельеф определяет, как текут реки, как освещается и увлажняется почва, и как растут деревья. Для тех, кто работал с топографическими картами и ЦМР, это должно быть очевидно: рельеф лежит в основе того, как мы расселяемся и ведём свою хозяйственную деятельность.
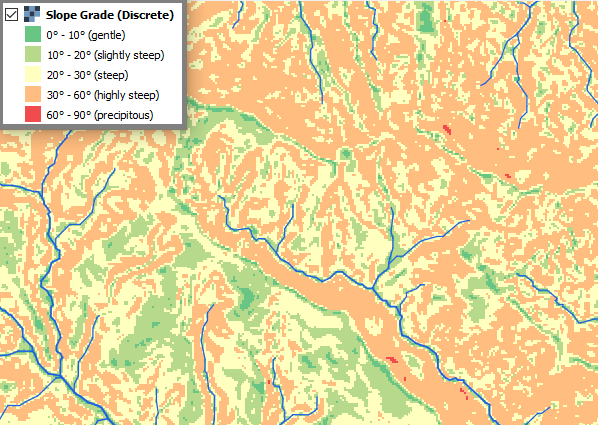
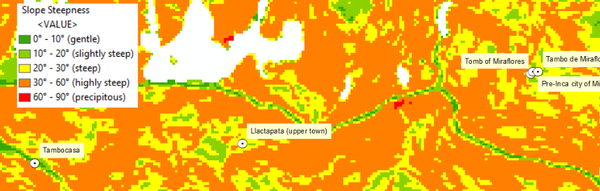
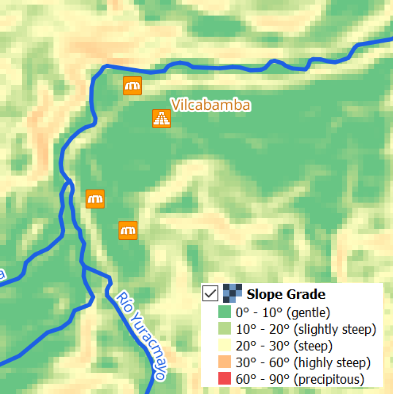
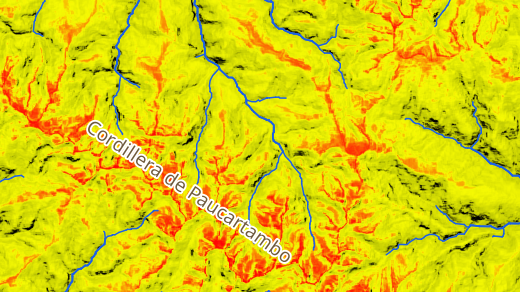
Крутизна
Крутизна (или уклон) определяет степень изменения поверхности в горизонтальном и вертикальном направлениях и измеряется в градусах от 0 до 90. Мы решили посмотреть, какие значения крутизны соответствуют древним и современным поселениям в зоне нашего интереса. Результаты интересные: оказывается, что поселения располагаются на поверхностях с крутизной не больше 20°. Даже живя в высокогорье, люди всё рано находят достаточно ровные поверхности для жизни. Можно значительно сократить район поиска, уверенно исключив непригодные для жизни области с крутизной больше 30°.
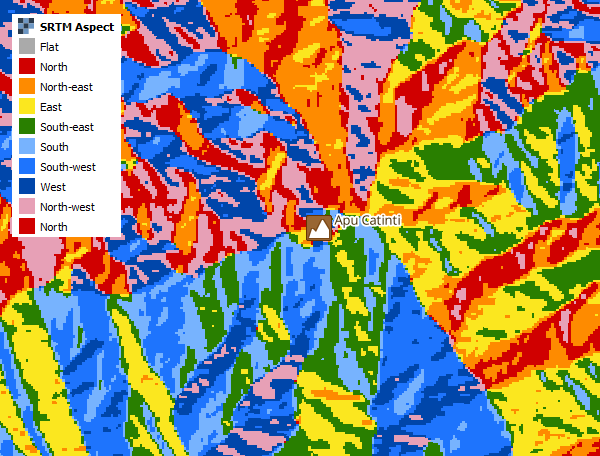
Экспозиция
Каждое из известных поселений инков в центре их империи располагалось таким образом, чтобы быть освещённым утренним солнцем (как по религиозным, так и по практическим соображениям) [1]. Возникает вопрос — а можно ли выделить такие участки, на которых можно было бы встречать рассвет? Да, можно, если рассчитать экспозицию рельефа, которая определяет направление по компасу уклона склона. В ГИС это является тривиальное задачей.
Расчёт поступающего солнечного излучения
Изучая космические снимки и ЦМР, мы заметили, что некоторые территории постоянно находятся в тени из-за особенностей топографии. Тогда ещё одна идея пришла нам в голову: а что, если оценить поступающее на поверхность солнечное излучение (инсоляцию), чтобы отфильтровать такие неблагоприятные для жизни места? Для расчёта инсоляции мы использовали ПО ArcGIS Pro — это заняло несколько дней, так как процесс вычислений очень ресурсоёмкий. Результат — это растровая карта распределения радиации, где каждый пиксел содержит число, выраженное в ваттах на квадратный метр (Вт/м2). Нам, конечно, не важны абсолютные значения инсоляции. Мы сравнили, какие уровни излучения соответствуют населённым пунктам и обнаруженным руинам, и в итоге отсекли явно неблагоприятные области, которые почти не освещаются солнцем.
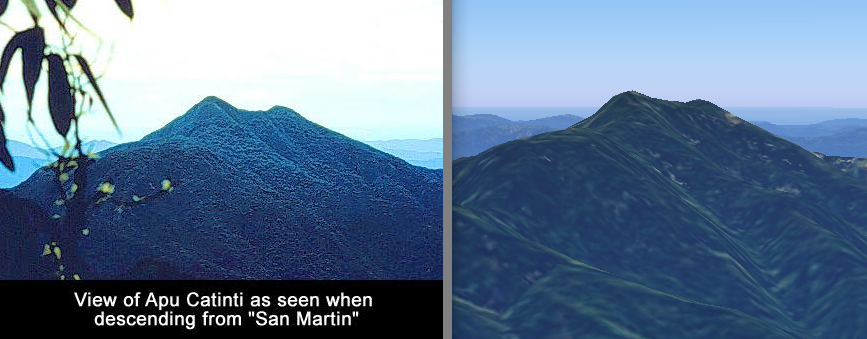
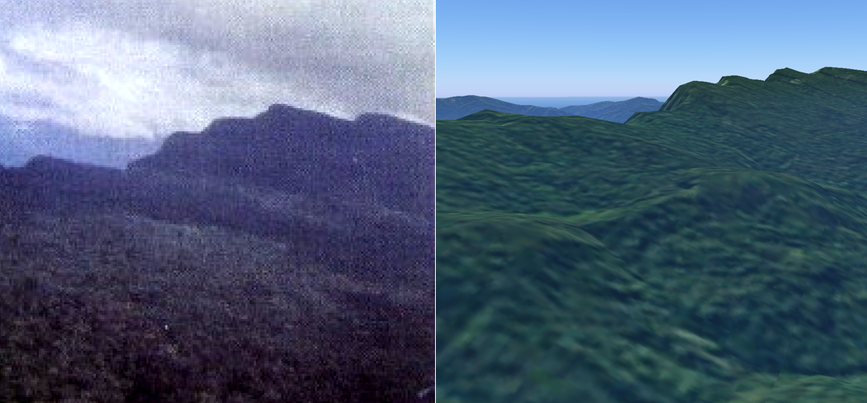
3D-моделирование
Добавление к пространственным данным третьего измерения в разы усиливает наши способности к их интерпретации. Имея ЦМР можно воссоздать рельеф в 3D, а затем наложить на него все остальные данные.
Визуальный анализ

Компьютерный анализ видимости
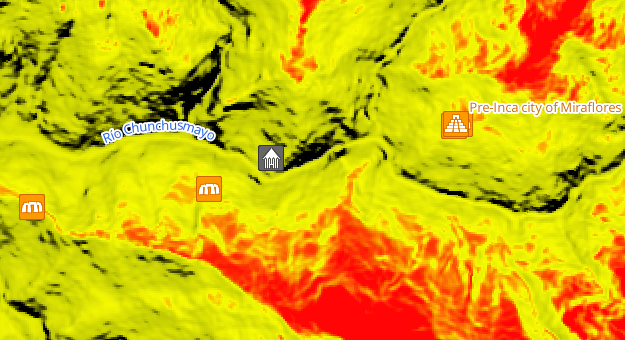
Изучая территорию в трёхмерном режиме, мы вдруг обнаружили один интересный факт: все руины в долине реки Чунчусмайо были взаимно видимы:
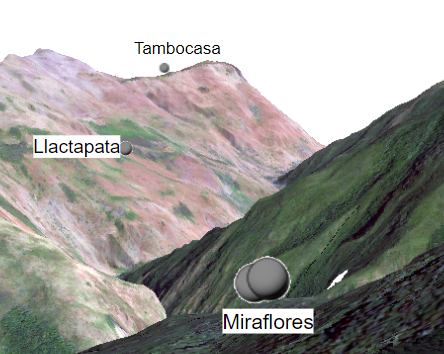
Позже мы нашли подтверждение нашей теории. Инки регулярно использовали для коммуникации простые способы в зонах прямой видимости: дым и отражённый солнечный свет днём и сигнальные костры по ночам [2]. Таким образом, вооружённые ещё одной подсказкой к поискам Пайтити, мы стали проверять теорию на практике, чтобы выделит те районы, которые наблюдаемы с уже известных руин.

Создание тематических карт
Так называемые тематические карты передают с большой полнотой какие-либо элементы, свойства или явления, которые не показываются на общегеографических картах. Нас интересовали два свойства ландшафта, карты для которых невозможно найти в готовом виде — это пригодность территории для жизни людей и её проходимость пешком.
Карта проходимости
Эта карта нужна нам для планирования наземной экспедиции, чтобы провести маршрут по самому оптимальному пути (с точки зрения длительности и простоты передвижения). В качестве главных факторов, влияющих на проходимость, мы выбрали:
- плотность древесной растительности
- крутизну поверхности
Для оценки густоты леса мы использовали карты VCF (Vegetation Continuous Fields), созданные в Университете Мэриленда по данным со спутников Landsat. Для оценки крутизны мы взяли созданную нами на основе ЦМР карту уклона поверхности. Чтобы скомбинировать эти два набора данных, они были приведены к одной шкале. Результирующая карта проходимости показывает распределение индекса в значении от 1 до 5, где 5 — это легко проходимые участки (ровные и обезлесенные), а 1 — абсолютно непроходимые (крутые склоны с густым лесом).
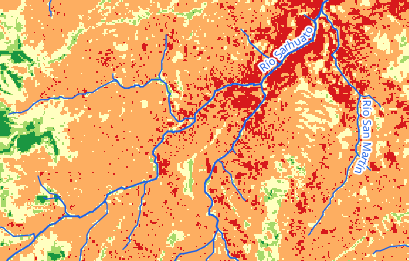
Разный цвет на карте кодирует разные значения индекса проходимости участков:
- Красный — полностью непроходимые
- Оранжевый — почти непроходимые
- Жёлтый — проходимые с трудом
- Салатовый — проходимые
- Тёмно-зелёный — легко проходимые
Карта пригодности к заселению
Мы создали несколько разных карт для отдельных факторов, которые, как мы считаем, влияют на пригодность территорий к жизни людей. Это уже известные вам карты крутизны, инсоляции и экспозиции. Также мы попробовали оценить увлажнённость района исследования через расчёт так называемого топографического индекса влажности. Однако после многочисленных экспериментов, мы остановились только на двух факторах, из которых и создали карту пригодности к заселению:
- крутизна поверхности
- инсоляция
Принцип объединения этих двух карт был такой же, что и для карты проходимости. В результате мы получили индекс пригодности, принимающий значения от 1 до 5, где 5 — это ровные и хорошо освещённые участки, пригодные для хозяйственной деятельности человека.
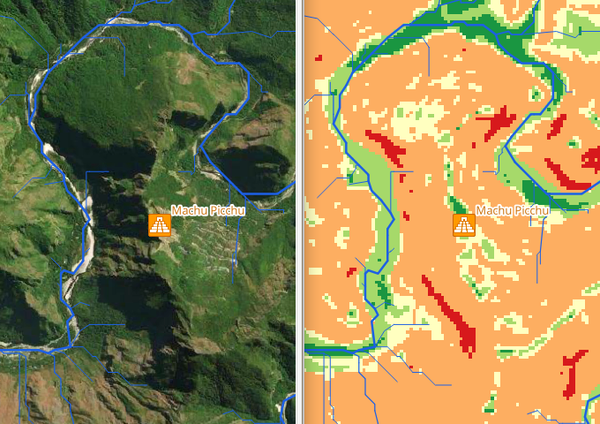
Индекс пригодности закодирован на нашей карте следующими цветами:
- Красный — полностью непригодные
- Оранжевый — непригодные
- Жёлтый — немного непригодные
- Салатовый — пригодные
- Тёмно-зелёный — самые пригодные
Изначальный район наших исследований был равен примерно 1300 кв.км. После составления карты пригодности к заселению, мы сократили область поисков в несколько раз, избавив себя от многих часов бесподной работы.
Дешифрирование аэрокосмических снимков
Это — заключительный этап камеральной работы. Значительно сократив площадь поиска Пайтити с помощью вышеописанного пространственного анализа, мы смогли перейти к дешифрированию данных ДЗЗ с различных спутников и летательных аппаратов (подробнее читайте в разделе «Геоданные, которые мы используем»). Теперь уже мы можем детально рассматривать территории высокогорной перуанской сельвы в поисках чего-то «подозрительного», используя разные спектральные диапазоны: от видимого (средняя длина волны 500 нм) до микроволнового (длина волны около 20 см).
Мы провели дешифрирование визуально, то есть используя самый совершенный инструмент для этого: наши глаза и мозг. На самом деле опыт в автоматическом распознавании у нас есть, и не малый, и мы попытались автоматизировать этот процесс, но столкнулись с несколькими проблемами:
- Мы не можем чётко формализовать что же мы ищем в понятный компьютеру вид. Это может быть, например, вариация в цвете и яркости лесного покрова, своеобразная игра тени и света… У нас есть идея как применить технологии машинного обучения для поиска археологических объектов в необитаемых местах, однако это требует серьёзного научного изучения и большого опыта в написание новых алгоритмов машинного обучения.
- Данные ДЗЗ, что у нас есть и пригодные для детальных поисков, обладают недостаточным спектральным разрешением. Так, мы попытались увязать спектральные свойства растительности со свойствами подстилающей поверхности. Например, если некие каменные полупогребённые структуры находятся под пологом леса, то они наверняка изменяют режим увлажнения и питания почвы в конкретном месте. Это должно сказаться на содержании хлорофилла в листьях (что мы можем измерить из космоса), на количестве биомассы, что в итоге приводит к изменению отражающей способности в контрасте с окружающими деревьями. К сожалению, самые подходящие из публично доступных космических снимков, которые могут решить такую задачу, имеют низкое пространственное разрешение (около 10 м). Необходим заказ космической съёмки с коммерческих спутников сверхвысокого разрешения (30 см).
Посмотреть на некоторые из найденных потенциальных руин, вы можете на странице «Текущие результаты».
Перспективы
Приобретение данных ДЗЗ с лучшим пространственным и спектральным разрешением (а такие данные доступны на коммерческом рынке) позволит нам значительно ускорить и упростить задачу по поиску новых археологических объектов. Но, как бы то ни было, лишь наземная экспедиция сможет расставить все точки над i. Самым лучшим вариантом, к которому мы стремимся, будет приобретение беспилотного летательного аппарата (БПЛА), оснащённого лазерным сканером, который позволит получить картину поверхности под покровом густого леса.