Introduzione
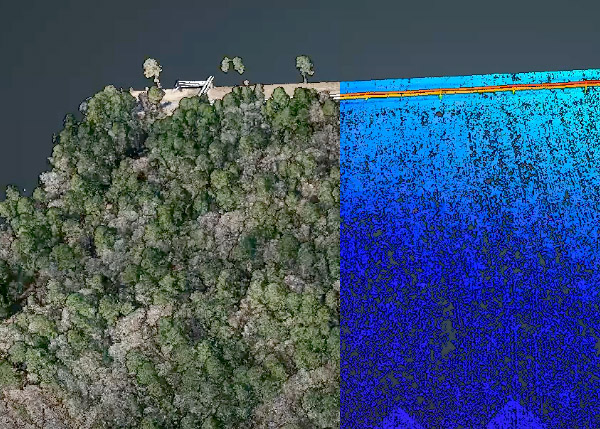
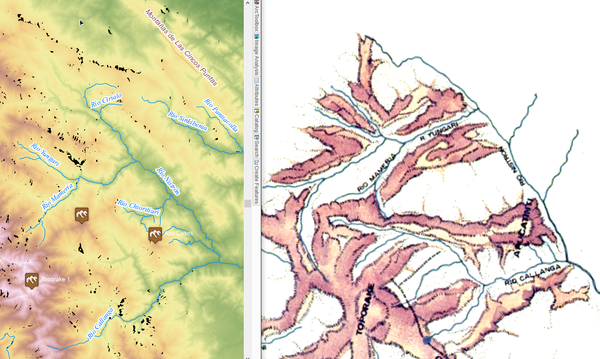
Dall’inizio del 2017, abbiamo raccolto tutti i tipi di dati spaziali riguardanti Paititi: immagini satellitari, mappe antiche e moderne, testimonianze scritte e orali, risultati di altre spedizioni, documenti autentici e leggende. È stato un compito difficile, che continuiamo a svolgere ancora oggi. Poiché lavoriamo con informazioni digitali, abbiamo anche bisogno di mappe in formato digitale: non immagini JPEG scansionate, ma in un formato adatto all’analisi geoinformativa. L’area del nostro interesse è una regione disabitata sui pendii orientali delle Ande, e i materiali cartografici relativi a essa sono difficili da reperire. Quando disponibili, sono spesso di piccola scala e poco informativi. Per capire meglio di cosa stiamo parlando, osservate queste due illustrazioni qui sotto:

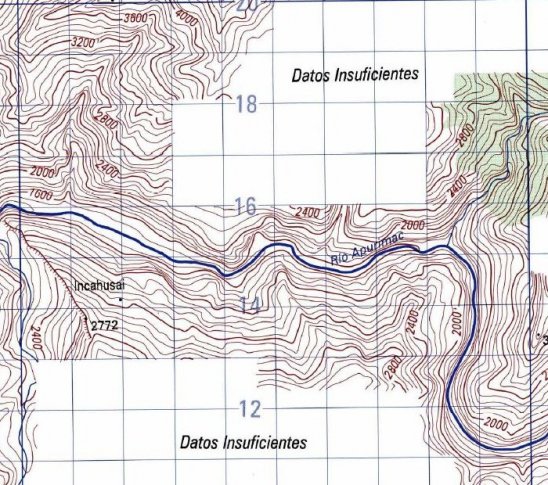
Solo il telerilevamento della Terra (di seguito ERS, Earth Remote Sensing) ci consente di ottenere informazioni affidabili e pertinenti sull’area di studio, mentre i sistemi di informazione geografica (di seguito GIS, Geographic Information System) raccolgono le conoscenze sul territorio in un unico luogo e ci aiutano nella ricerca di una risposta alla domanda principale: “Dove si trova Paititi?”
Struttura del GIS “Alla ricerca di Paititi”
Per sfruttare al meglio i dati raccolti, abbiamo sviluppato il nostro GIS, che per bellezza chiameremo “Alla ricerca di Paititi”. Al centro della sua infrastruttura c’è un server privato virtuale che utilizza il sistema operativo Ubuntu. Sul server (che chiamiamo GIS server) abbiamo installato alcuni software di geoinformazione e mappatura open-source:
- PostgreSQL—un sistema di gestione di database relazionale a oggetti con estensione PostGIS per supportare le funzionalità geografiche
- GeoServer—software per la pubblicazione di geodati su un server (server di mappe)
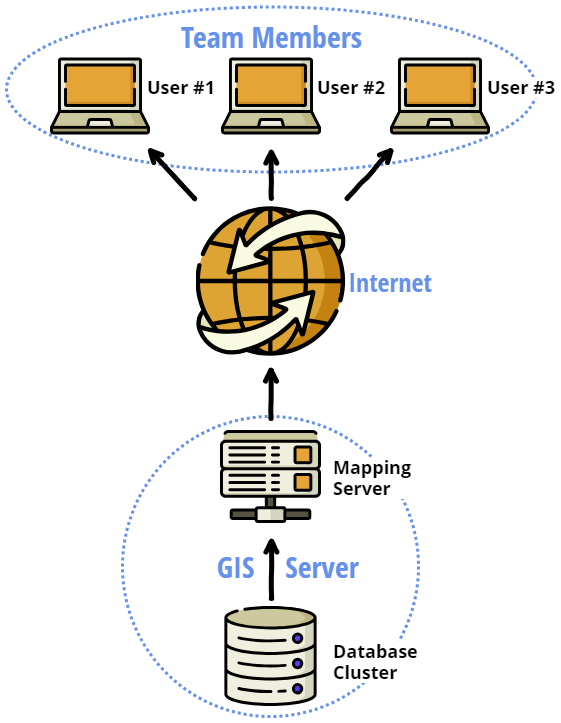
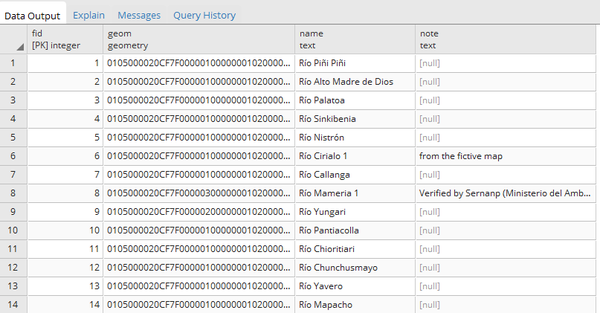
Gli oggetti geografici appartenenti a tipi diversi (ad esempio, “fiumi”, “strade inca”, “villaggi”, ecc.) sono memorizzati in tabelle separate, e le loro coordinate sono registrate in forma binaria non leggibile (per velocizzare l’elaborazione):
Una volta alla settimana, il database viene automaticamente sottoposto a backup e inviato a uno storage cloud per prevenire la perdita del nostro lavoro in caso di guasto del server GIS. Entro un giorno, possiamo ripristinare il progetto almeno allo stato di una settimana fa.
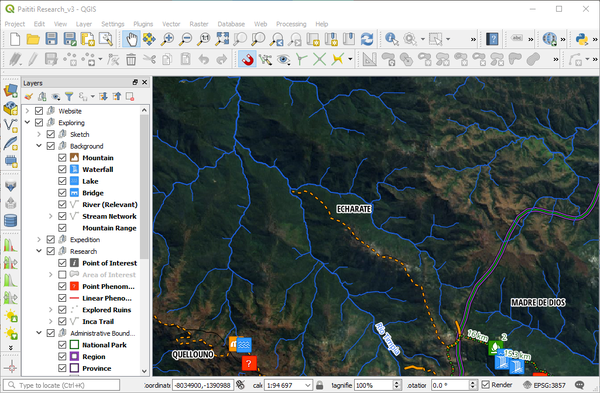
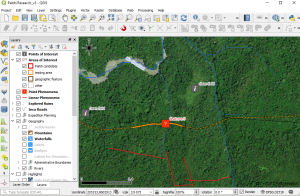
Memorizzare tutte le nostre informazioni spaziali in un unico database ci offre una grande opportunità: tutti i membri del team di Paititi Research possono connettersi da remoto ovunque nel mondo. Per fare ciò, è necessario installare il software open source QGIS (funziona su Windows, Mac OS e Linux) sul proprio computer. In QGIS è possibile visualizzare i nostri geodati nella forma consueta di una mappa composta da singoli Layer GIS, oltre a condurre varie analisi. Il modo di accesso è configurato individualmente per ogni utente, determinando cosa può essere visualizzato o modificato (ad esempio, aggiungere nuovi oggetti interpretando immagini satellitari).
Analisi Geoinformativa
Quindi inizia la fase più interessante—l’analisi geoinformativa: la creazione di nuove conoscenze a partire da quelle esistenti. Qui dimostriamo al meglio le nostre capacità. È importante notare il grande contributo che il modello digitale di elevazione (di seguito DEM, Digital Elevation Model) apporta alla nostra ricerca. Permette di estrarre le caratteristiche quantitative della superficie, simulare il movimento dei flussi d’acqua e calcolare l’illuminazione del territorio.
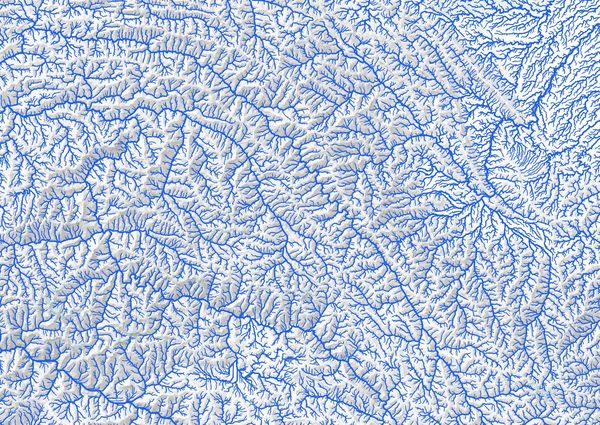
Modellazione della rete idrografica dettagliata
La rete fluviale è la base della nostra ricerca, con la quale abbiamo iniziato il nostro lavoro. I nomi dei fiumi si riferiscono a fonti letterarie; tutte le spedizioni descrivono i loro movimenti in relazione ai fiumi; con l’aiuto dei fiumi georeferenziamo mappe antiche; infine, lungo i fiumi le persone costruiscono e costruivano le loro abitazioni. Per collegare informazioni verbali occasionali a un riferimento di coordinate nel GIS, è fondamentale disporre di una mappa dettagliata della rete fluviale con i nomi effettivi dei corsi d’acqua. E una tale mappa pronta non si trova. Fortunatamente, simulare il movimento dei flussi d’acqua, avendo un DEM, non è un grosso problema. Questo è quello che abbiamo fatto. Naturalmente, dopo aver ricevuto una tale mappa, è necessario fornire nomi ai fiumi e torrenti, compito già molto più difficile: essendo nell’altro emisfero terrestre, non è sempre possibile scoprire come i locali chiamano un piccolo fiume (purtroppo, Internet non è onnipotente). Tuttavia, alla fine siamo riusciti a identificare tutti i fiumi che in qualche modo sono collegati alla ricerca di Paititi.
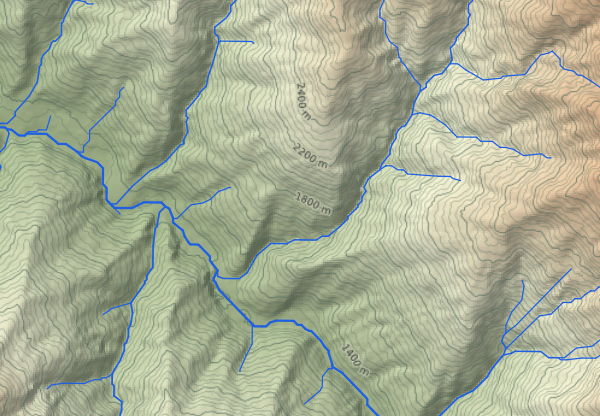
Ottenere le caratteristiche morfometriche del rilievo
Il rilievo determina come scorrono i fiumi, come viene irrigata e illuminata la superficie e come crescono gli alberi. Per chi ha lavorato con mappe topografiche e DEM, dovrebbe essere evidente: il rilievo è la base su cui costruiamo i nostri insediamenti e conduciamo le nostre attività economiche.
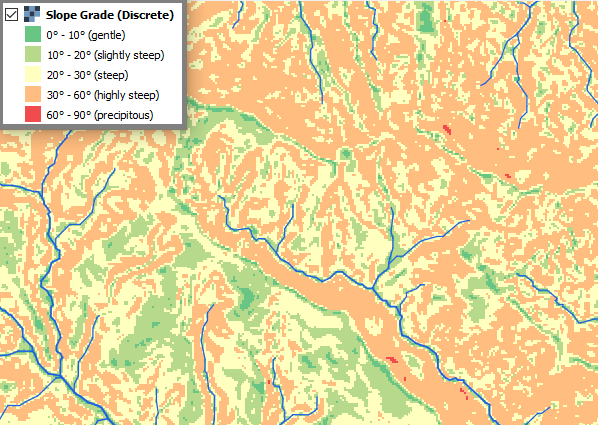
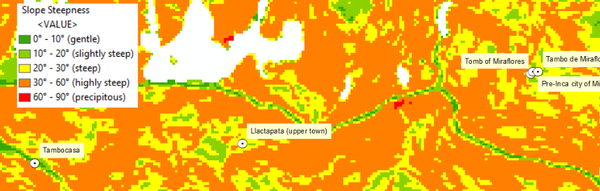
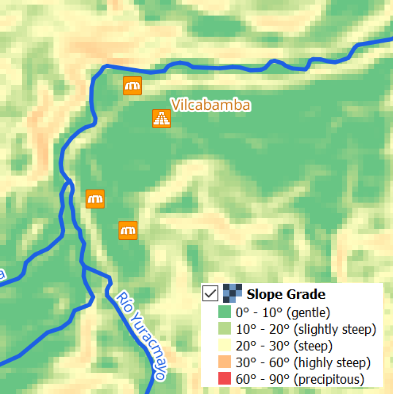
Pendenza della superficie
La pendenza determina il grado di variazione della superficie nelle direzioni orizzontale e verticale ed è misurata in gradi da 0 a 90. Abbiamo cercato di verificare quali valori di pendenza corrispondono agli insediamenti antichi e moderni nell’area di nostro interesse. I risultati sono interessanti: si scopre che gli insediamenti si trovano su superfici con una pendenza non superiore a 20°. Anche vivendo in alta montagna, le persone trovano superfici abbastanza pianeggianti per vivere. Pertanto, possiamo ridurre significativamente l’area di ricerca, escludendo con sicurezza le aree inabitabili con pendenze superiori a 60°.
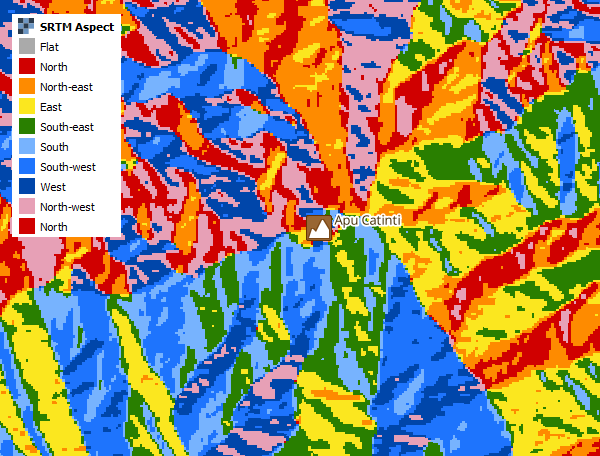
Esposizione della superficie
Ogni sito Inca conosciuto al centro del loro impero era situato per ricevere il sole del mattino (sia per ragioni religiose che pratiche). Sorge quindi la domanda: è possibile identificare aree del territorio in cui sia possibile incontrare l’alba? La risposta è sì: possiamo farlo calcolando l’esposizione del rilievo, che determina la direzione del pendio rispetto ai punti cardinali. Questo è un compito banale nei GIS.
Calcolo della radiazione solare incidente
Studiando le immagini spaziali e il DEM, abbiamo notato che alcune aree sono costantemente in ombra a causa delle peculiarità del rilievo. Poi ci è venuta un’altra idea: e se valutassimo la radiazione solare incidente sulla superficie (insolazione) per filtrare tali luoghi sfavorevoli alla vita? Per calcolare l’insolazione abbiamo utilizzato un software chiamato ArcGIS Pro, e il processo ha richiesto diversi giorni, poiché è molto dispendioso in termini di risorse. Il risultato è una mappa tematica raster della distribuzione della radiazione, dove ogni pixel contiene un numero espresso in watt per metro quadrato (W/m2). Ovviamente, i valori assoluti di insolazione non sono importanti per noi. Abbiamo confrontato i livelli di radiazione corrispondenti agli insediamenti moderni e alle rovine scoperte, eliminando alla fine le aree ovviamente sfavorevoli, quasi non illuminate dal sole.
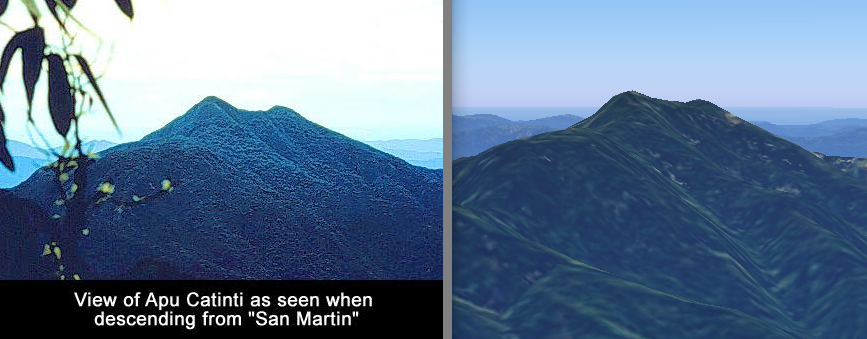
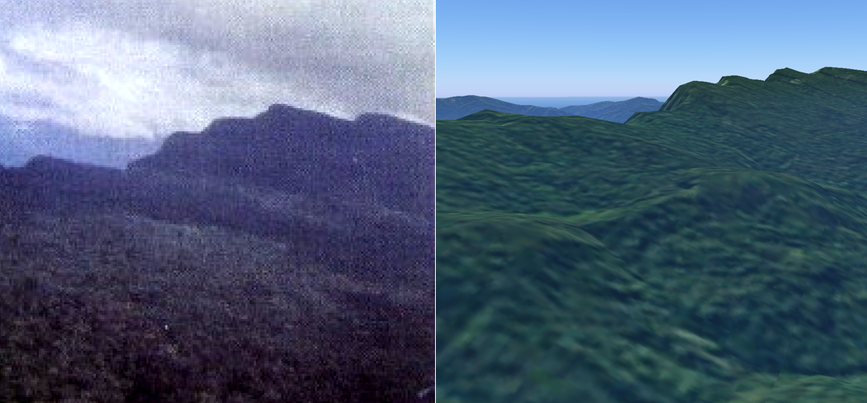
Modellazione 3D
L’aggiunta della terza dimensione ai dati spaziali aumenta significativamente la nostra capacità di interpretarli. Avendo un DEM, è possibile ricreare il rilievo in 3D e poi sovrapporre tutti gli altri dati.
Analisi visiva

Analisi computerizzata della visibilità
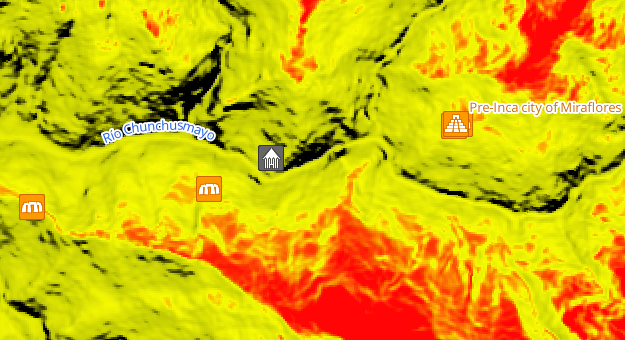
Studiando il territorio in modalità tridimensionale, abbiamo scoperto un fatto interessante: tutte le rovine nella valle del fiume Chunchusmayo erano visibili l’una all’altra.
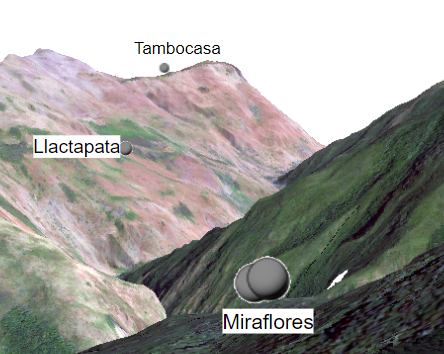
Successivamente, abbiamo trovato una conferma della nostra teoria. Gli Inca utilizzavano regolarmente metodi di comunicazione semplici in linea diretta di vista: fumo e luce solare riflessa durante il giorno e fuochi di guardia di notte. Armati di questo nuovo indizio per la ricerca di Paititi, abbiamo iniziato a testare la teoria nella pratica, evidenziando le aree che possono essere osservate dalle rovine già conosciute.

Creazione di mappe tematiche
Le cosiddette mappe tematiche rappresentano con grande completezza elementi, proprietà o fenomeni che non sono mostrati sulle mappe geografiche generali. Siamo interessati a due proprietà del paesaggio per le quali non si trovano mappe disponibili: la vivibilità del territorio e la sua percorribilità a piedi.
Mappa della percorribilità
Abbiamo bisogno di questa mappa per pianificare una spedizione a terra, per tracciare il percorso nel modo più ottimale (in termini di durata e facilità di movimento). I principali fattori che influenzano la percorribilità sono:
- densità della vegetazione
- pendenza della superficie
Per valutare la densità della foresta, abbiamo utilizzato le mappe VCF (Vegetation Continuous Fields) create dall’Università del Maryland basate sui dati dei satelliti Landsat. Per la pendenza abbiamo utilizzato il DEM. Per combinare questi due set di dati, sono stati riclassificati agli stessi valori. La mappa risultante mostra l’indice di percorribilità con un valore da 1 a 5, dove 5 rappresenta aree facilmente percorribili (pianeggianti e senza foresta) e 1 quelle assolutamente impraticabili (pendii ripidi con foresta densa).
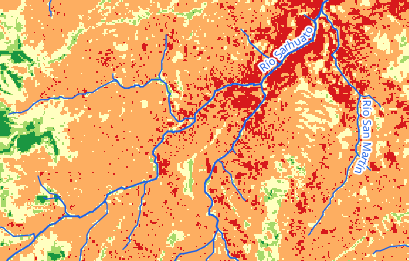
Mappa di vivibilità del territorio
Abbiamo creato diverse mappe per fattori individuali che riteniamo influenzino la vivibilità delle aree per le persone. Questi fattori includono mappe già note come la pendenza, l’insolazione e l’esposizione della superficie. Abbiamo anche cercato di valutare l’umidità dell’area di studio attraverso il calcolo del cosiddetto indice di umidità topografica. Tuttavia, dopo numerosi esperimenti, ci siamo concentrati su due fattori principali, dai quali abbiamo creato una mappa di vivibilità del territorio:
- pendenza della superficie
- insolazione
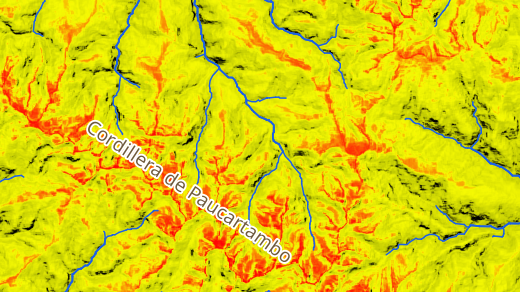
Il principio di combinazione di queste due mappe è lo stesso usato per la mappa della percorribilità del terreno. Il risultato è un indice di vivibilità che assume valori da 1 a 5, dove 5 corrisponde ad aree pianeggianti e ben illuminate, adatte all’attività umana.
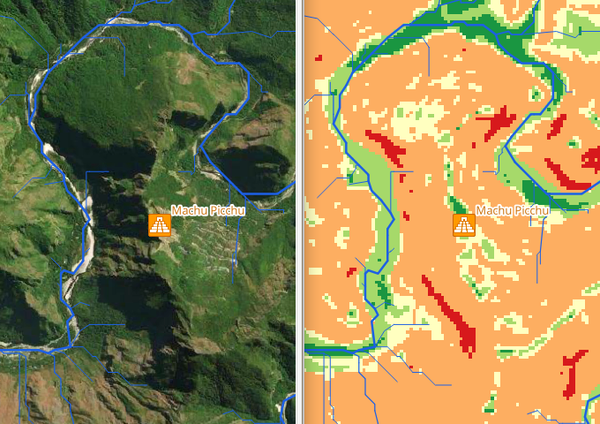
L’indice di vivibilità è codificato sulla nostra mappa in diversi colori come segue:
- Rosso—poco adatto
- Arancione—non adatto
- Giallo—leggermente non adatto
- Verde chiaro—adatto
- Verde scuro—molto adatto
L’area iniziale della nostra ricerca era di circa 1300 km². Dopo aver mappato la vivibilità del territorio, abbiamo ridotto l’area di ricerca di molte volte, risparmiandoci molte ore di lavoro infruttuoso.
Interpretazione delle immagini satellitari
Questo è l’ultimo stadio dei nostri studi d’ufficio. Riducendo significativamente l’area di ricerca di Paititi attraverso le analisi spaziali precedenti, siamo stati in grado di procedere all’interpretazione dei dati di telerilevamento da vari satelliti e aerei (leggi di più in “Geodati utilizzati da noi”). Ora possiamo studiare in dettaglio il territorio della selva peruviana alta alla ricerca di qualcosa di “sospetto”, utilizzando diversi range spettrali: dal visibile (lunghezza d’onda media di 500 nm) al microonde (lunghezza d’onda di circa 20 cm).
Abbiamo effettuato l’interpretazione visivamente, utilizzando il miglior strumento per questo: i nostri occhi e il cervello. Abbiamo esperienza nel rilevamento tramite Machine Learning, e abbiamo cercato di automatizzare questo processo, ma ci siamo scontrati con diversi problemi:
- Non siamo in grado di formalizzare chiaramente ciò che stiamo cercando in una forma comprensibile per il computer. Questo può includere, ad esempio, variazioni nel colore e nella luminosità della copertura forestale, un certo gioco di ombra e luce… Abbiamo un’idea di come applicare tecniche di apprendimento automatico per cercare siti archeologici in aree disabitate, ma richiede uno studio scientifico approfondito e molta esperienza nella scrittura di nuovi algoritmi di apprendimento automatico.
- I dati di telerilevamento che abbiamo, e che sono adatti per ricerche dettagliate, hanno una risoluzione spettrale insufficiente. Abbiamo cercato di collegare le proprietà spettrali della vegetazione con le caratteristiche della superficie sottostante. Ad esempio, se alcune strutture in pietra sono semi-sepolte sotto la copertura forestale, certamente cambiano il regime di umidità e nutrizione del suolo in un determinato luogo. Questo dovrebbe influire sul contenuto di clorofilla nelle foglie (misurabile dallo spazio), sulla quantità di biomassa, che alla fine porta a un cambiamento nella riflettanza rispetto agli alberi circostanti. Purtroppo, le immagini satellitari pubblicamente disponibili più adatte a risolvere questo problema hanno una risoluzione spaziale bassa (circa 10 m). È necessario ordinare immagini satellitari da satelliti commerciali ad altissima risoluzione (30 cm).
Puoi vedere alcune delle potenziali rovine trovate nella pagina “Risultati attuali”.
Prospettive future
L’acquisizione di dati di telerilevamento con la migliore risoluzione spaziale e spettrale (e tali dati sono disponibili sul mercato commerciale) ci consentirà di accelerare e semplificare significativamente il compito di trovare nuovi siti archeologici. Tuttavia, solo una spedizione sul campo potrà fornire risposte definitive. L’opzione migliore, a cui aspiriamo, è l’acquisizione di un veicolo aereo senza pilota (UAV), dotato di uno scanner laser (lidar), che fornirà un’immagine dettagliata della superficie sotto la copertura di una fitta foresta.